Working Period: October 2016 - December 2016
Tools: P5.js
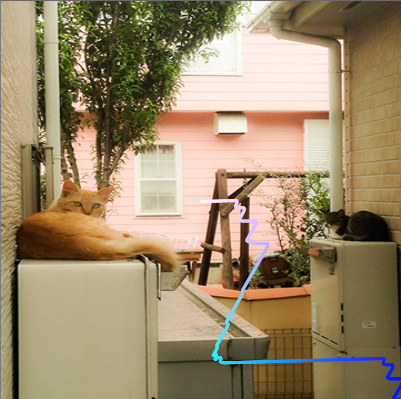
The selected background image is converted to the command which defines the direction of the turtle walk.
Each pixel of the image is sampled, and the strongest one of the R, G, or B is assigned as a command.
Thus, the direction of the curve reflects the dominant color factor.
Each pixel of the image is sampled, and the strongest one of the R, G, or B is assigned as a command.
Thus, the direction of the curve reflects the dominant color factor.
背景として選択された画像からturtle walkの進行方向を指示するコマンドを生成します。
画像の各ピクセルをサンプリングし、RGBの内最も数値の大きいものをコマンドとして採用します。
従って、turtleによって生成される線は選択された画像の基調となる色味を示していると言えます。
画像の各ピクセルをサンプリングし、RGBの内最も数値の大きいものをコマンドとして採用します。
従って、turtleによって生成される線は選択された画像の基調となる色味を示していると言えます。
To test it online;
https://codepen.io/kayk5654/pen/mOVQgo
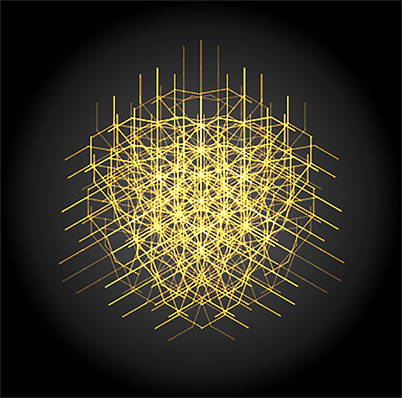
This is an application of the L-system.
この作品はイスラム美術より着想を得てL-systemの応用を試みたものです。
Iterationの回数を設定して画像を生成することができます。
Iterationの回数を設定して画像を生成することができます。
https://codepen.io/kayk5654/pen/ObgBda
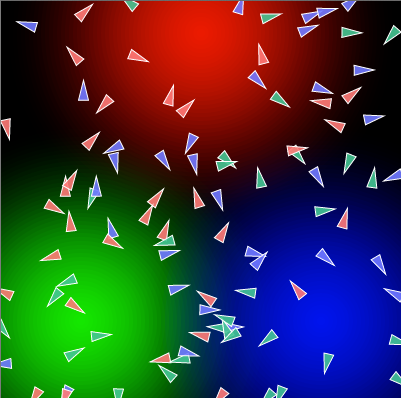
This is an application of the "Breitenberg vehicle".
この作品はBreitenberg vehicleの応用を試みたものです。
それぞれの"vehicles"はvehicle自体の色を嗜好するよう設定されています。
vehicleは背景の嗜好する色の部分に向かって移動し、それ以外の色の部分を避けるように移動します。
背景の有彩色の部分はドラッグで移動できます。
それぞれの"vehicles"はvehicle自体の色を嗜好するよう設定されています。
vehicleは背景の嗜好する色の部分に向かって移動し、それ以外の色の部分を避けるように移動します。
背景の有彩色の部分はドラッグで移動できます。
To test it online;
https://codepen.io/kayk5654/pen/wgaYjW
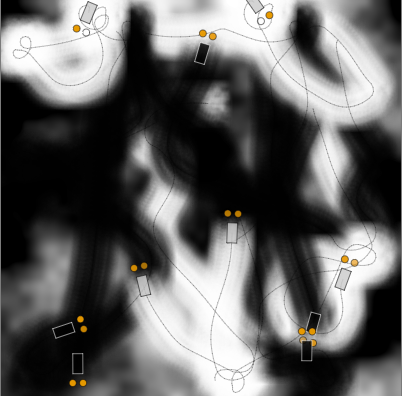
This is another application of the "Breitenberg vehicle".
この作品も"Breitenberg vehicle"の応用です。
各vehicleの「目」は背景の最も近いピクセルの明度を認識します。
また、各vehicleはそれ自体の色味を嗜好します。
黒いvehicleは背景の暗い部分へ向かって移動し、ライトグレーのvehicleは明るい部分へ向かって移動します。
vehicleが移動した軌跡はブラシとして背景に描画され、vehicleが参照する背景の色味が更新されます。
各vehicleの「目」は背景の最も近いピクセルの明度を認識します。
また、各vehicleはそれ自体の色味を嗜好します。
黒いvehicleは背景の暗い部分へ向かって移動し、ライトグレーのvehicleは明るい部分へ向かって移動します。
vehicleが移動した軌跡はブラシとして背景に描画され、vehicleが参照する背景の色味が更新されます。
https://codepen.io/kayk5654/pen/ygQGBP